Multimodal and Mixed Control of Robotic Endoscopes
People involved
Ignacio Avellino, Sorbonne Université
Gilles Bailly, Sorbonne Université
Mario Aricò, Sorbonne Université
Guillaume Morel, Sorbonne Université
Geoffroy Canlorbe, Hôpital Pitié Salpêtrière & Sorbonne Université

Abstract
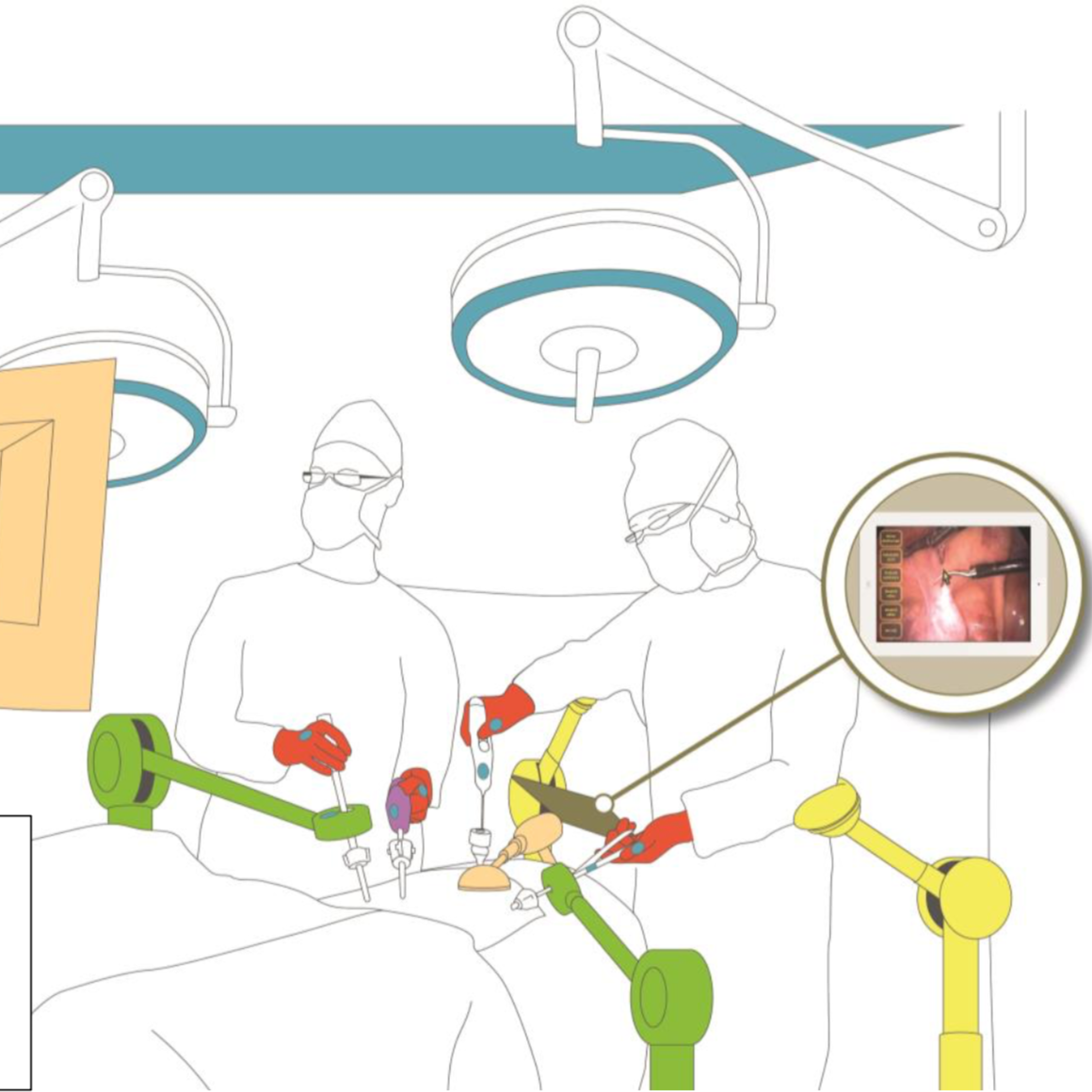
Bedside robotic endoscopes render surgeons autonomous from assistants, potentially improving surgical outcome and decreas- ing costs. Why then have they not been widely adopted? We take a step back and first characterize classic (non-robotic) endoscope use through observations, literature and a domain expert interview. We review the literature on bedside robotic endoscopes and find that existing controls, individually, do not have the power to support both intended and appropriated en- doscope uses. We thus explore combining controls to support this diversity of uses. Through an iterative cycle, we design and implement a multimodal and mixed-initiative technique that combines two user controls and one system control. Our evaluations confirm that individual controls do not satisfy the diversity of endoscope uses, and also that our technique indeed does so. Our work highlights the relevance of HCI research in the medical domain through robotic systems.