Impacts of Telemanipulation in Robotic Assisted Surgery
People involved
Ignacio Avellino, Sorbonne Université
Gilles Bailly, Sorbonne Université
Geoffroy Canlorbe, Hôpital Pitié Salpêtrière & Sorbonne Université
Jérémie Belghiti, Hôpital Pitié Salpêtrière
Guillaume Morel, Sorbonne Université
Marie-Aude Vitrani, Sorbonne Université

Abstract
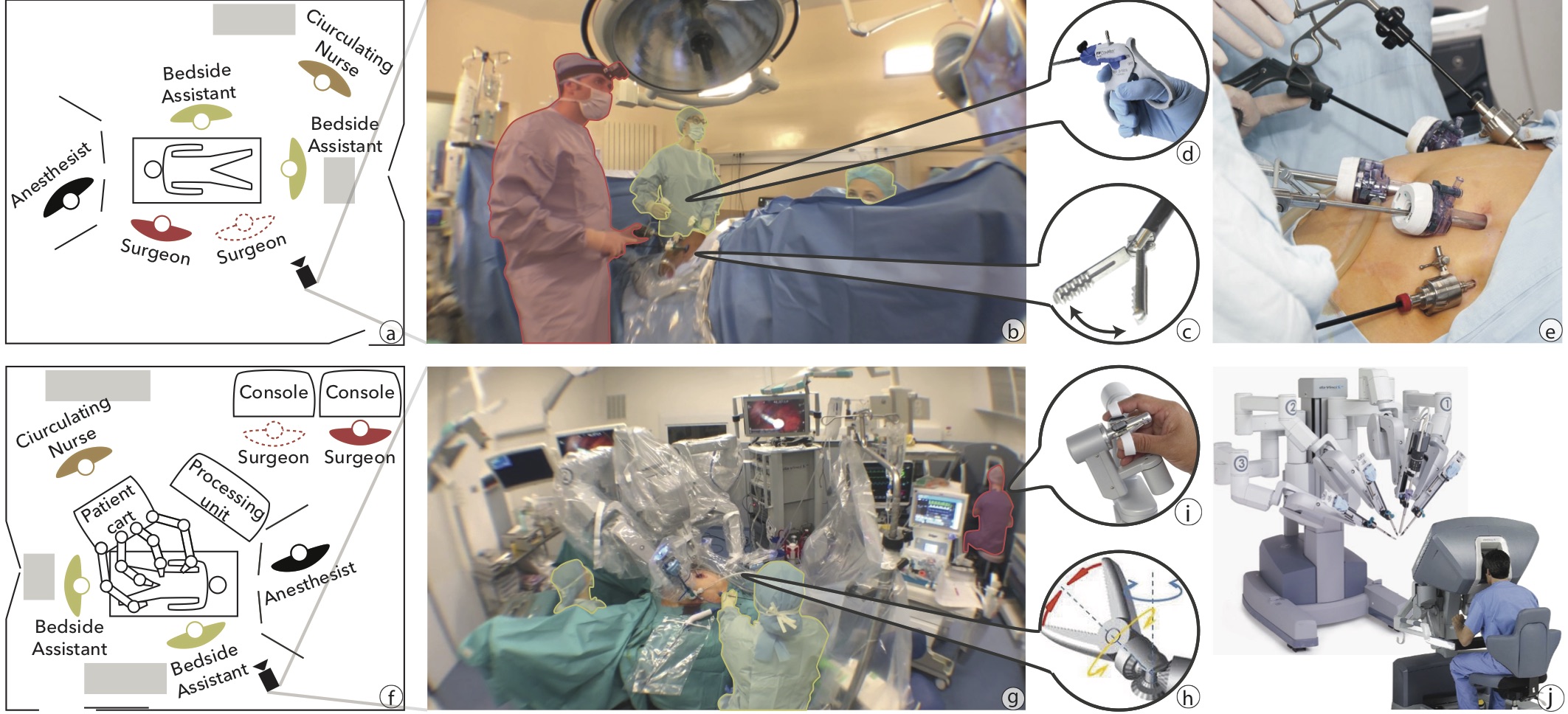
Robotic-assisted Minimally Invasive Surgery (MIS) is adopted more and more as it overcomes the shortcomings of classic MIS for surgeons while keeping the benefits of small incisions for patients. However, introducing new technology oftentimes affects the work of skilled practitioners. Our goals are to investigate the impacts of telemanipulated surgical robots on the work practices of surgical teams and to understand their cause. We conducted a field study observing 21 surgeries, conducting 12 interviews and performing 3 data validation sessions with surgeons. Using Thematic Analysis, we find that physically separating surgeons from their teams makes them more autonomous, shifts their use of perceptual senses, and turns the surgeon’s assistant into the robot’s assistant. We open design opportunities for the HCI field by questioning the telemanipulated approach and discussing alternatives that keep surgeons on the surgical field.
Presentation
Project description
Main Findings
Robotic assistance to Minimally Invasive Surgery is realized today through a telemanipulated approach. We identify three unintended impacts of Telemanipulation in Robotic Assisted Surgery:
1. The Autonomous but Withdrawn Surgeon. The surgeon gains autonomy, as the telemanipulation console lets her control all the complex operations of the robot independently, however, overloading her cognition which can lead to errors in manipulating the robotic interface. Sitting at the console withdraws the surgeon, reducing situational awareness of other team member’s actions as well as social interaction with the team.
2. Shifting the Use of Perceptual Senses. The telemanipulation console removes haptic feedback and isolates the surgeon’s attention, limiting visual contact with the team.
3. From Surgeon Assistant to Robot Assistant. The surgical assistant’s tasks shift from assisting the surgeon (holding a tissue, cutting) to assisting the robot (untangling arms, changing tools).
In conclusion, robots bring enormous benefits to surgery, but their interface design can cause even greater drawbacks. Telemanipulation is one approach but not the only one. We encourage future HCI research to explore the continuum Surgeon-to-Patient distance as a design dimension, bringing the surgeon closer to the patient and her team, and thus making surgery minimally invasive not only for the patient but also for the surgeon.
